축의 구조에 따른 분류
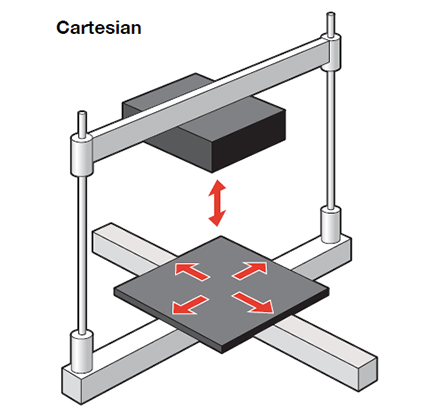
① 카르테시안 방식
직교 좌표계(rectangular coordinate system)는 임의의 차원의 유클리드 공간을 나타내는 좌표계의 하나입니다. 이를 발명한 프랑스의 수학자 데카르트의 이름을 붙여서 데카르트 좌표계(Cartesian coordinate system)라고도 부릅니다.
카르테시안 좌표계의 원리를 이용한 방신으로 필라멘트를 압출하는 압출기와 베드 부분이 X, Y, Z 부분 운동을 나누어 프린팅 합니다.
카르테시안 방식의 특징은 베드 부분이 Z축으로만 운동하는 것이 아닌, X축 Y축으로도 운동하는 점입니다. 이론상으로는 기계(모터)가 3가지 축을 전부 계산하며 운동해야하기 때문에, 느린 FFF 3D 프린팅 방식이며, 모든 축이 운동하기 때문에 출력물의 안정성도 떨어집니다. 많은 FFF방식의 3D프린터가 이 방식에 해당됩니다.
 |
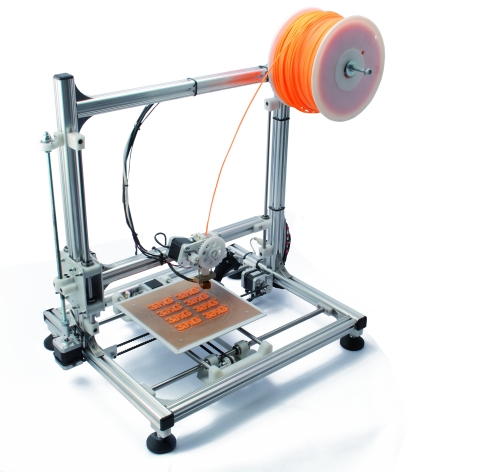 |
| 출처 : PwC analysis | 출처 : reprap.org |
② 멘델(Hbot) 방식
멘델 방식은 위에서 아래로 내려다보면 H모양을 닮아서 'H-Bot' 방식이라고도 부릅니다. 멘델 방식의 노즐은 X축과 Y축으로만 운동하고, 베드는 Z축으로 내려가기만 합니다. 압출기의 두 개의 축이 운동하는 카르테시안 방식에 비해서 안정적입니다. 최근에 출시되는 FDM 방식의 3D 프린터가 이 방식을 사용하고 있습니다.
 |
 |
| 출처 : reprap.org | |
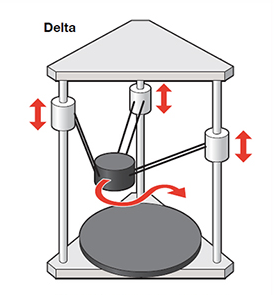
③ 델타(Delta) 방식
최근 자주 출시되고 있는 삼각형 기둥모양의 프린터가 델타 방식입니다. 델타방식 3D프린터의 특징은 압출기부분이 X, Y, Z축의 운동을 하고, 베드부분은 고정되어 있는 점입니다. 그래서 한 축으로 모든 3D 프린팅을 하기 때문에, FDM방식 중에서는 제일 빠르며, 베드가 고정되어 있어서 출력물 또한 안정적으로 출력이 가능합니다. 델타 방식의 단점은 크기에 비해 출력 사이즈가 작다는 단점이 있습니다.
 |
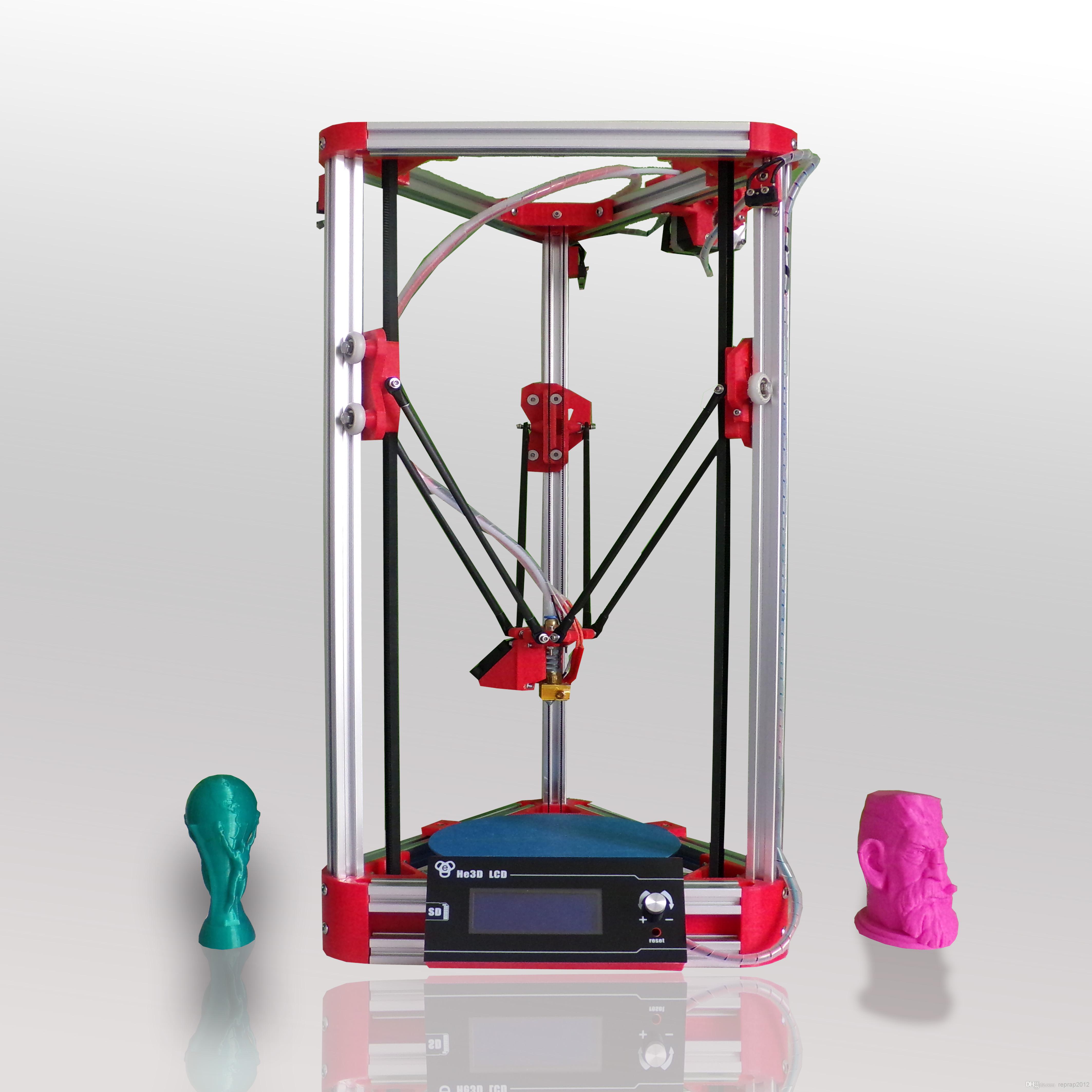 |
| 출처 : PwC analysis | 출처 : reprap.org |
④ 로봇팔 방식
최근에 개발된 로봇팔방식은 애호가들의 많은 관심을 받고 있습니다. 현시점에서는 가격과 기술적인 여러 요소들로 인해 아직 빛을 보지 못하지만 잠재적인 장점들이 많아 향후 발전 가능성이 주목되는 방식입니다.
 |
 |
| 출처 : XEOS 3D Printer | 출처 : Flux Integration LLC |
| MX3D사의 6축 작업용 로봇을 이용해 3D 프린팅 출력을 하는 기술로 기존 3D프린터가 프레임 상자 속에 있어야 한다는 제약을 없앴습니다. 미래에는 멀티축 산업용 로봇을 이용해 정밀도가 지금보다 더 높은 입체 물을 출력할 수 있게 될 것으로 기대하고 있습니다. MX3D가 이용한 로봇팔 3D프린터 방식이라면 어떤 소재도 자유로운 크기와 모양으로 조형물을 출력할 것으로 보입니다. |
 |
| 출처 : mx3d.com |
열정 가득한 사람들과 함께 만들고, 배우고, 소통하며 당신의 가능성을 마음껏 펼쳐보실수 있는 카페을 만들었습니다.
좋은 정보 서로 공유 했으면 합니다..╰(*°▽°*)╯
https://cafe.naver.com/freecadk
프리캐드 : 네이버 카페
이 카페는 오픈소스 소프트웨어인 FreeCAD 와 업무용 무료프로그램 정보를 공유할수 있게 만들었습니다.
cafe.naver.com
'3D 프린터' 카테고리의 다른 글
| 3D 프린터 필라멘트(PLA, ABS, PETG, TPU, Nylon, PC)의 장단점과 차이점 (2) | 2024.08.08 |
|---|---|
| 3D 프린터 재료 (3) | 2024.08.08 |
| 10. FFF방식의 3D 프린터 3 - FFF 방식의 분류 1 (1) | 2024.05.20 |
| 09. FFF방식의 3D 프린터 2 - FFF 방식의 주요부품 및 구성 (3) | 2024.05.20 |
| 08. FFF방식의 3D 프린터 1 - FFF(FDM) 방식이란? (3) | 2024.05.20 |